Working group 2 had its virtual kickoff workshop on 5 December, 2025. Several people interested in actively participating in the working group were joining the discussions. The goal of the workshop was to get an overview of current topics and questions related to WG2. Moreover, we started establishing smaller subgroups tackling specific tasks.
Below you find the program of the workshop and some files related to the meeting. For the abstracts of the presentations, please klick on the small arrows in the table below.
All times mentioned in the table below are CET.
| Time | Agenda item | Moderator/Speaker | Material |
|---|---|---|---|
| 9:00-9:15 | Welcome and presentation of the working group | Hendrik Kleikamp/Francisco Periago | Slides Recording |
| 9:15-9:45 |
Presentation T2.1 - Breaking the curse of dimensionality in some control and parametric problems for PDEsAbstract: The talk will address the following five issues:
|
Francisco Periago | Slides Recording |
| 9:45-10:00 | Round table discussion about T2.1 | Francisco Periago | |
| 10:00-10:20 | Short coffee break | ||
| 10:20-10:50 |
Presentation T2.2 - Solving parameterised optimal control problems using machine learningAbstract: In many real-world applications, the governing dynamical systems depend on physical parameters that significantly shape their behavior. When tackling parameterised optimal control problems, this dependence introduces substantial computational challenges—particularly in multi-query scenarios, where one must repeatedly solve an optimal control problem for numerous parameter values. Making such tasks tractable requires methods that explicitly exploit the structure of the control problems and their parameter dependence.In this presentation, I will survey several research directions aimed at addressing these challenges, with a particular emphasis on how machine learning techniques can be integrated into classical solution strategies. I will discuss the difficulties inherent to multi-query settings, outline emerging opportunities created by combining model-based and data-driven approaches, and highlight open questions that motivate further exploration. |
Hendrik Kleikamp | Slides Recording |
| 10:50-11:05 | Round table discussion about T2.2 | Hendrik Kleikamp | |
| 11:05-11:15 | Short coffee break | ||
| 11:15-11:45 |
Presentation T2.3 - Computing control Lyapunov functions with neural networksAbstract: This talk will give an overview of methods that propose to use neural networks for computing control Lyapunov functions. After explaining what control Lyapunov functions are and why they are interesting, we briefly review early approaches from the 1990s and then turn to recent developments. These focus on avoiding singularities, providing formal verification, and overcoming the curse of dimensionality. The talk closes with open problems and challenges in the field. |
Lars Grüne | Slides Recording |
| 11:45-12:00 | Round table discussion about T2.3 | Lars Grüne | |
| 12:00-13:30 | Lunch break | ||
| 13:30-14:00 |
Presentation T2.4 - On the life-cycle-optimisation problems in materials and the deep neural network approachAbstract: Throughout the life cycle of materials, the bulk of machanical objects may lose their elastic properties due to the appearence of micro defects or local damage. In my short presentation I would like to focus on the questions as to how to exert an external influence on an elastic body in order to optimize a desired performance index and reduce potential damage using for that the deep neural network approach. Furthermore, I am also going to discuss possible ways for the correct definition and implementation of the new concept of sustainable controls which could help us to achieve the announced twofold goal.In the context of above-mentioned problems, I will begin with a brief overview of the mathematical damage modeling. I will specifically focus on the models in which material damages can be described by a scalar damage field $ζ = ζ(t, x)$, which acts as an internal variable measuring the fractional decrease in the stress-strain response. In this case, the corresponding elasticity system may exhibit a degeneration. This means that, for certain damage field $ζ(t, x)$, this problem may lack the uniqueness of weak solutions due to the Lavrentieff phenomenon. So, one of the principal point at this stage is to study the solvability issues for the proposed modes and highlight some questions which seem to be open for nowadays. The next point, I would like to touch on, is the formulation of possible and plausible statements for sustainable optimal control problems within the framework of `life-cycle optimization`. Because of the degeneration in the principle part of differential operators and the $L^1$-properties of the right-hand sides of PDEs involved in the proposed models, issues of solvability and the existence of approximate solutions of the corresponding optimal control problems remain under-researched. At the end of my presentation I would like to dwell on the development of machine learning approach to the study and practical implementation of the aforementioned OCPs. In this context, I am going to discuss some issues closely related to the deep neural network application to our business and highlight some key questions that need to be answered. |
Peter Kogut | Slides Recording |
| 14:00-14:15 | Round table discussion about T2.4 | Peter Kogut | |
| 14:15-14:25 | Short coffee break | ||
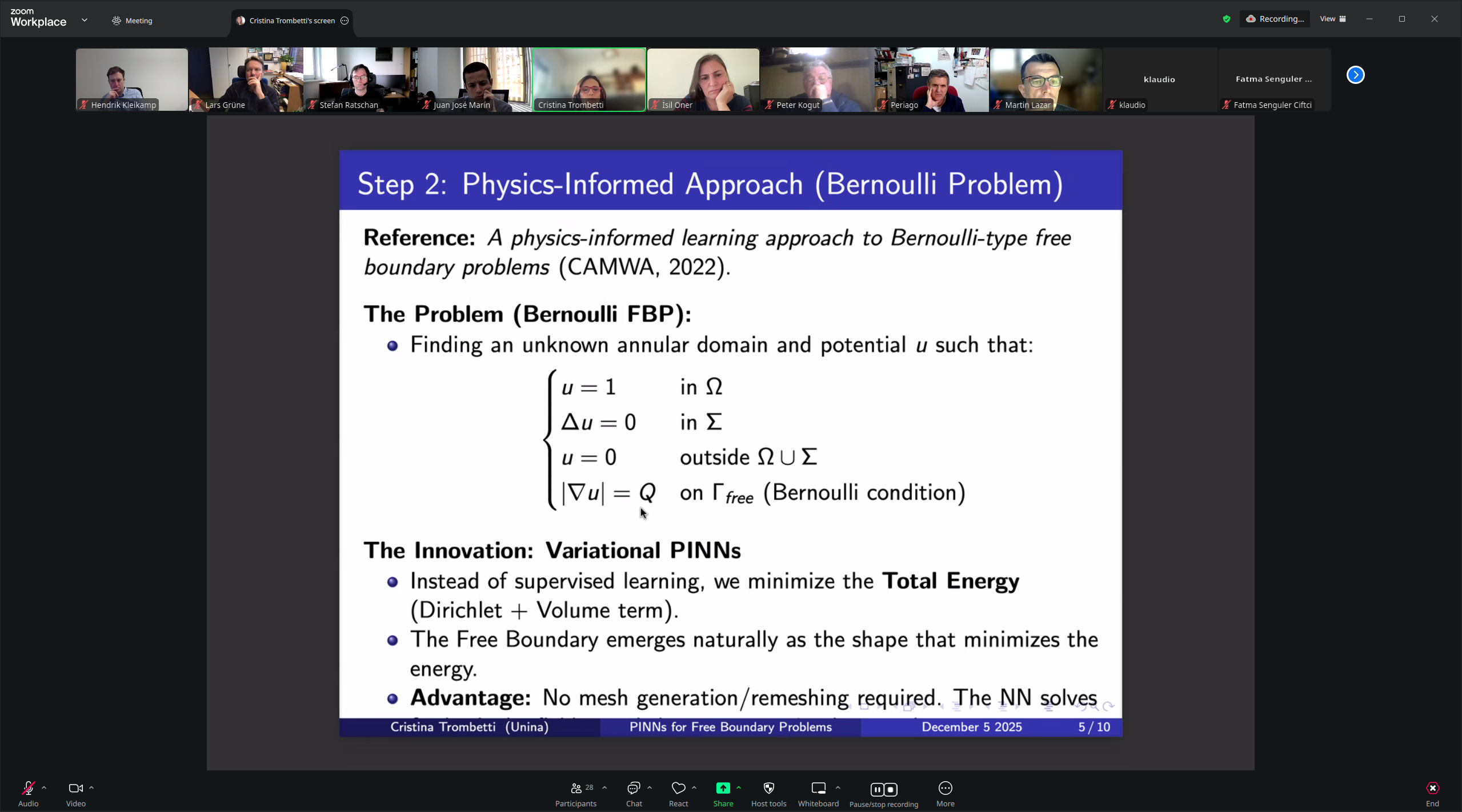
| 14:25-14:55 | Presentation T2.5 - Exploiting PINNs for solving complex free boundary problems | Cristina Trombetti | Slides Recording |
| 14:55-15:10 | Round table discussion about T2.5 | Cristina Trombetti | |
| 15:10-15:30 | Closing | Hendrik Kleikamp/Francisco Periago | Recording |
Here you find some files such as the presentation shown during the workshop or the list of open problems:
University of Graz, Leechgasse 34, 8010 Graz, Austria
Universidad Politecnica De Cartagena, Plaza Del Cronista Isidoro Valverde Edificio La Milagrosa, 30202 Cartagena, Spain